
線性代數筆記-31
17 May 2021 | linear algebraauthor: zlotus
Description:
這是MIT 18.06 Linear-Algebra 的學習筆記
第三十一講:線性變換及對應矩陣
如何判斷一個操作是不是線性變換?線性變換需滿足以下兩個要求:
\[T(v+w)=T(v)+T(w)\\ T(cv)=cT(v)\]即變換\(T\)需要同時滿足加法和數乘不變的性質。將兩個性質合成一個式子為:\(T(cv+dw)=cT(v)+dT(w)\)
例1,二維空間中的投影操作,\(T: \mathbb{R}^2\to\mathbb{R}^2\),它可以將某向量投影在一條特定直線上。檢查一下投影操作,如果我們將向量長度翻倍,則其投影也翻倍;兩向量相加後做投影與兩向量做投影再相加結果一致。所以投影操作是線性變換。
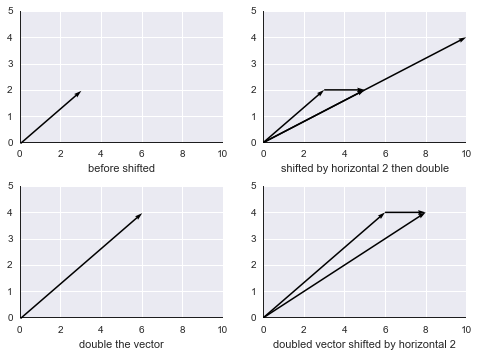
“壞”例1,二維空間的平移操作,即平面平移:
%matplotlib inline
import matplotlib.pyplot as plt
import seaborn as sns
import numpy as np
fig = plt.figure()
sp1 = plt.subplot(221)
vectors_1 = np.array([[0,0,3,2],])
X_1, Y_1, U_1, V_1 = zip(*vectors_1)
plt.axhline(y=0, c='black')
plt.axvline(x=0, c='black')
sp1.quiver(X_1, Y_1, U_1, V_1, angles='xy', scale_units='xy', scale=1)
sp1.set_xlim(0, 10)
sp1.set_ylim(0, 5)
sp1.set_xlabel("before shifted")
sp2 = plt.subplot(222)
vector_2 = np.array([[0,0,3,2],
[3,2,2,0],
[0,0,5,2],
[0,0,10,4]])
X_2,Y_2,U_2,V_2 = zip(*vector_2)
plt.axhline(y=0, c='black')
plt.axvline(x=0, c='black')
sp2.quiver(X_2, Y_2, U_2, V_2, angles='xy', scale_units='xy', scale=1)
sp2.set_xlim(0, 10)
sp2.set_ylim(0, 5)
sp2.set_xlabel("shifted by horizontal 2 then double")
sp3 = plt.subplot(223)
vectors_1 = np.array([[0,0,6,4],])
X_1, Y_1, U_1, V_1 = zip(*vectors_1)
plt.axhline(y=0, c='black')
plt.axvline(x=0, c='black')
sp3.quiver(X_1, Y_1, U_1, V_1, angles='xy', scale_units='xy', scale=1)
sp3.set_xlim(0, 10)
sp3.set_ylim(0, 5)
sp3.set_xlabel("double the vector")
sp4 = plt.subplot(224)
vector_2 = np.array([[0,0,6,4],
[6,4,2,0],
[0,0,8,4]])
X_2,Y_2,U_2,V_2 = zip(*vector_2)
plt.axhline(y=0, c='black')
plt.axvline(x=0, c='black')
sp4.quiver(X_2, Y_2, U_2, V_2, angles='xy', scale_units='xy', scale=1)
sp4.set_xlim(0, 10)
sp4.set_ylim(0, 5)
sp4.set_xlabel("doubled vector shifted by horizontal 2")
plt.subplots_adjust(hspace=0.33)
plt.draw()
plt.close(fig)
比如,上圖中向量長度翻倍,再做平移,明顯與向量平移後再翻倍的結果不一致。
有時我們也可以用一個簡單的特例判斷線性變換,檢查\(T(0)\stackrel{?}{=}0\)。零向量平移後結果並不為零。
所以平面平移操作並不是線性變換。
“壞”例2,求模運算,\(T(v)=\|v\|,\ T:\mathbb{R}^3\to\mathbb{R}^1\),這顯然不是線性變換,比如如果我們將向量翻倍則其模翻倍,但如果我將向量翻倍取負,則其模依然翻倍。所以\(T(-v)\neq -T(v)\)
例2,旋轉\(45^\circ\)操作,\(T:\mathbb{R}^2\to\mathbb{R}^2\),也就是將平面內一個向量映射為平面內另一個向量。檢查可知,如果向量翻倍,則旋轉後同樣翻倍;兩個向量先旋轉後相加,與這兩個向量先相加後旋轉得到的結果一樣。
所以從上面的例子我們知道,投影與旋轉都是線性變換。
例3,矩陣乘以向量,\(T(v)=Av\),這也是一個(一系列)線性變換,不同的矩陣代表不同的線性變換。根據矩陣的運算法則有\(A(v+w)=A(v)+A(w),\ A(cv)=cAv\)。比如取\(A=\begin{bmatrix}1&0\\0&-1\end{bmatrix}\),作用於平面上的向量\(v\),會導致\(v\)的\(x\)分量不變,而\(y\)分量取反,也就是圖像沿\(x\)軸翻轉。
線性變換的核心,就是該變換使用的相應的矩陣。
比如我們需要做一個線性變換,將一個三維向量降至二維,\(T:\mathbb{R}^3\to\mathbb{R}^2\),則在\(T(v)=Av\)中,\(v\in\mathbb{R}^3,\ T(v)\in\mathbb{R}^2\),所以\(A\)應當是一個\(2\times 3\)矩陣。
如果我們希望知道線性變換\(T\)對整個輸入空間\(\mathbb{R}^n\)的影響,我們可以找到空間的一組基\(v_1,\ v_2,\ \cdots,\ v_n\),檢查\(T\)對每一個基的影響\(T(v_1),\ T(v_2),\ \cdots,\ T(v_n)\),由於輸入空間中的任意向量都滿足:
\[v=c_1v_1+c_2v_2+\cdots+c_nv_n\tag{1}\]所以我們可以根據\(T(v)\)推出線性變換\(T\)對空間內任意向量的影響,得到:
\[T(v)=c_1T(v_1)+c_2T(v_2)+\cdots+c_nT(v_n)\tag{2}\]現在我們需要考慮,如何把一個與坐標無關的線性變換變成一個與坐標有關的矩陣呢?
在\(1\)式中,\(c_1,c_2,\cdots,c_n\)就是向量\(v\)在基\(v_1,v_2,\cdots,v_n\)上的坐標,比如分解向量\(v=\begin{bmatrix}3\\2\\4\end{bmatrix}=3\begin{bmatrix}1\\0\\0\end{bmatrix}+2\begin{bmatrix}0\\1\\0\end{bmatrix}+4\begin{bmatrix}0\\0\\1\end{bmatrix}\),式子將向量\(v\)分解在一組標準正交基\(\begin{bmatrix}1\\0\\0\end{bmatrix},\begin{bmatrix}0\\1\\0\end{bmatrix},\begin{bmatrix}0\\0\\1\end{bmatrix}\)上。當然,我們也可以選用矩陣的特征向量作為基向量,基的選擇是多種多樣的。
我們打算構造一個矩陣\(A\)用以表示線性變換\(T:\mathbb{R}^n\to\mathbb{R}^m\)。我們需要兩組基,一組用以表示輸入向量,一組用以表示輸出向量。令\(v_1,v_2,\cdots,v_n\)為輸入向量的基,這些向量來自\(\mathbb{R}^n\);\(w_1,w_2,\cdots,w_m\)作為輸出向量的基,這些向量來自\(\mathbb{R}^m\)。
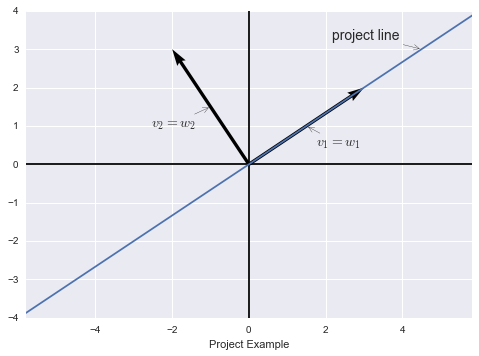
我們用二維空間的投影矩陣作為例子:
fig = plt.figure()
vectors_1 = np.array([[0, 0, 3, 2],
[0, 0, -2, 3]])
X_1, Y_1, U_1, V_1 = zip(*vectors_1)
plt.axis('equal')
plt.axhline(y=0, c='black')
plt.axvline(x=0, c='black')
plt.quiver(X_1, Y_1, U_1, V_1, angles='xy', scale_units='xy', scale=1)
plt.plot([-6, 12], [-4, 8])
plt.annotate('$$v_1=w_1$$', xy=(1.5, 1), xytext=(10, -20), textcoords='offset points', size=14, arrowprops=dict(arrowstyle="->"))
plt.annotate('$$v_2=w_2$$', xy=(-1, 1.5), xytext=(-60, -20), textcoords='offset points', size=14, arrowprops=dict(arrowstyle="->"))
plt.annotate('project line', xy=(4.5, 3), xytext=(-90, 10), textcoords='offset points', size=14, arrowprops=dict(arrowstyle="->"))
ax = plt.gca()
ax.set_xlim(-5, 5)
ax.set_ylim(-4, 4)
ax.set_xlabel("Project Example")
plt.draw()
plt.close(fig)
從圖中可以看到,設輸入向量的基為\(v_1,v_2\),\(v_1\)就在投影上,而\(v_2\)垂直於投影方向,輸出向量的基為\(w_1,w_2\),而\(v_1=w_1,v_2=w_2\)。那麽如果輸入向量為\(v=c_1v_1+c_2v_2\),則輸出向量為\(T(v)=c_1v_1\),也就是線性變換去掉了法線方向的分量,輸入坐標為\((c_1,c_2)\),輸出坐標變為\((c_1,0)\)。
找出這個矩陣並不困難,\(Av=w\),則有\(\begin{bmatrix}1&0\\0&0\end{bmatrix}\begin{bmatrix}c_1\\c_2\end{bmatrix}=\begin{bmatrix}c_1\\0\end{bmatrix}\)。
本例中我們選取的基極為特殊,一個沿投影方向,另一個沿投影法線方向,其實這兩個向量都是投影矩陣的特征向量,所以我們得到的線性變換矩陣是一個對角矩陣,這是一組很好的基。
所以,如果我們選取投影矩陣的特征向量作為基,則得到的線性變換矩陣將是一個包含投影矩陣特征值的對角矩陣。
繼續這個例子,我們不再選取特征向量作為基,而使用標準基\(v_1=\begin{bmatrix}1\\0\end{bmatrix},v_2=\begin{bmatrix}0\\1\end{bmatrix}\),我們繼續使用相同的基作為輸出空間的基,即\(v_1=w_1,v_2=w_2\)。此時投影矩陣為\(P=\frac{aa^T}{a^Ta}=\begin{bmatrix}\frac{1}{2}&\frac{1}{2}\\\frac{1}{2}&\frac{1}{2}\end{bmatrix}\),這個矩陣明顯沒有上一個矩陣“好”,不過這個矩陣也是一個不錯的對稱矩陣。
總結通用的計算線性變換矩陣\(A\)的方法:
- 確定輸入空間的基\(v_1,v_2,\cdots,v_n\),確定輸出空間的基\(w_1,w_2,\cdots,w_m\);
- 計算\(T(v_1)=a_{11}w_1+a_{21}w_2+\cdots+a_{m1}w_m\),求出的系數\(a_{i1}\)就是矩陣\(A\)的第一行;
- 繼續計算\(T(v_2)=a_{12}w_1+a_{22}w_2+\cdots+a_{m2}w_m\),求出的系數\(a_{i2}\)就是矩陣\(A\)的第二行;
- 以此類推計算剩余向量直到\(v_n\);
- 最終得到矩陣\(A=\left[\begin{array}{c\|c\|c\|c}a_{11}&a_{12}&\cdots&a_{1n}\\a_{21}&a_{22}&\cdots&a_{2n}\\\vdots&\vdots&\ddots&\vdots\\a_{m1}&a_{m2}&\cdots&a_{mn}\\\end{array}\right]\)。
最後我們介紹一種不一樣的線性變換,\(T=\frac{\mathrm{d}}{\mathrm{d}x}\):
- 設輸入為\(c_1+c_2x+c_3x^3\),基為\(1,x,x^2\);
-
則輸出為導數:\(c_2+2c_3x\),基為\(1,x\);
所以我們需要求一個從三維輸入空間到二維輸出空間的線性變換,目的是求導。求導運算其實是線性變換,因此我們只要知道少量函數的求導法則(如\(\sin x, \cos x, e^x\)),就能求出它們的線性組合的導數。
有\(A\begin{bmatrix}c_1\\c_2\\c_3\end{bmatrix}=\begin{bmatrix}c_2\\2c_3\end{bmatrix}\),從輸入輸出的空間維數可知,\(A\)是一個\(2\times 3\)矩陣,\(A=\begin{bmatrix}0&1&0\\0&0&2\end{bmatrix}\)。
最後,矩陣的逆相當於對應線性變換的逆運算,矩陣的乘積相當於線性變換的乘積,實際上矩陣乘法也源於線性變換。
Comments